

Например, устройство по переработке материалов необходимо синхронизировать с линией подачи исходного сырья и с линией транспортировки готовой продукции. Рассинхронизация в подобных условиях способна вызвать либо недостаточную подачу исходных материалов, что пагубно скажется на результате, либо, к примеру, готовый продукт просто не сможет вовремя покинуть рабочее место, что создаст как минимум «завал».
В результате все это требует привлечения отдельного квалифицированного работника в случае несложной задачи или серьезной инженерной компании, которая предложит сложную схему автоматизации, требующую серьезных капитальных вложений и последующего обслуживания.
В любом случае возможное решение проблемы может быть реализовано стандартной схемой, о которой многие инженеры попросту не знают или забыли.
В данной статье речь пойдет о последовательном соединении преобразователей частоты, управляющих электродвигателями отдельных операций, в единую систему, которая поможет решить ряд задач по оптимизации.
Итак, преобразователь частоты.
Практически все частотные преобразователи имеют в своем арсенале несколько различных входов и выходов.
Рассмотрим основные:
Как правило данный вход служит для приема входного аналогового сигнала стандартного промышленного диапазона 0(4)…20мА или 0…10В (возможна инверсия). Преобразователь частоты при определенных условиях способен изменять собственный режим работы под действием данного управляющего сигнала. К примеру, минимальная величина входного аналогового сигнала может соответствовать минимальной выходной частоте преобразователя, а максимальная величина – максимальной выходной частоте.
Данный вход в зависимости от модификации способен принимать дискретные (скачкообразные) сигналы различного уровня и частоты. По сути, вход реагирует на резкое изменение амплитуды входного сигнала либо на изменение его частоты. Частотный преобразователь при определенных условиях, также, как и в случае с аналоговым входом, способен изменить собственный режим работы под действием входного дискретного управляющего сигнала. Пример: скачкообразное изменение величины входного сигнала приведет к запуску/останову электродвигателя, или минимальная частота входного дискретного (импульсного) сигнала будет соответствовать минимальной выходной частоте преобразователя, а максимальная – максимальной выходной частоте.
Аналоговый выход практически любого преобразователя частоты формирует электрический сигнал стандартного промышленного диапазона 0(4)…20мА или 0…10В (возможна инверсия). Данный электрический сигнал с выхода преобразователя может быть использован как показательная величина режима работы «частотника». Например, минимальная величина выходного аналогового сигнала соответствует максимальной выходной частоте преобразователя, а максимальная величина – минимальной выходной частоте.
Дискретный выход современных преобразователей способен формировать резкое изменение амплитуды выходного сигнала при определенных условиях либо изменять частоту выходного сигнала в зависимости от режима работы (состояния устройства). К примеру, скачкообразное изменение величины выходного сигнала может отобразить запуск/останов электродвигателя, или определенная частота выходного дискретного (импульсного) сигнала может обозначить выход электродвигателя на режим минимальных/максимальных оборотов.
Последовательный интерфейс RS-485 – это полноценный цифровой канал, который по сравнению с предыдущими видами связи позволяет наиболее полно взаимодействовать с преобразователями частоты, в том числе и через персональный компьютер. Интерфейс RS-485 подразумевает передачу цифрового сигнала (команд, информации и так далее) по двухпроводной линии связи. Для увеличения помехозащищенности в интерфейсе используется дифференциальный сигнал, благодаря которому максимальная длина линии может быть 1200м. Цифровые команды позволяют полностью управлять преобразователем частоты (чтение/запись параметров, управление в режиме реального времени и так далее).
Единственная сложность управления «частотником» через интерфейс – это протокол (набор цифровых слов с уникальным составом, понятный только приборам конкретного производителя). В отличие от аналоговых и дискретных сигналов преобразователи частоты от разных производителей могут не работать друг с другом по последовательному интерфейсу в виду отличных протоколов связи.
Вернемся к поставленной задаче – как синхронизировать отдельные операции, завязать их в единую систему, которая поможет решить ряд задач по оптимизации технологического процесса.
Последовательное соединение преобразователей частоты.
Образно назначаем основной ПЧ («Ведущий», «MASTER», как угодно.) – преобразователь, работающий на основной операции.
Назначаем периферийные ПЧ («Ведомый», «SLAVE», как угодно.) – преобразователи, работающие на второстепенных операциях.
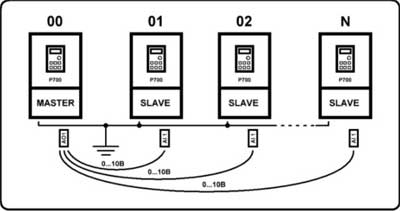
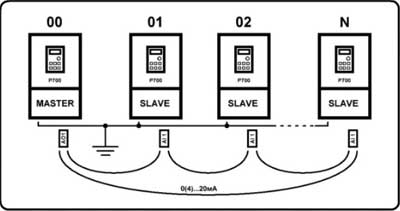
Аналоговый сигнал.
К аналоговому выходу основного ПЧ подключаем аналоговые входы периферийных ПЧ. С помощью меню функций, в зависимости от режимов работы, устанавливаем для каждого ПЧ необходимые параметры аналоговых входов/выходов (выходные для основного и входные для периферийных). Также возможен вариант, когда основной ПЧ сам будет управляться по аналоговому сигналу обратной связи, например, от датчика давления или температуры.
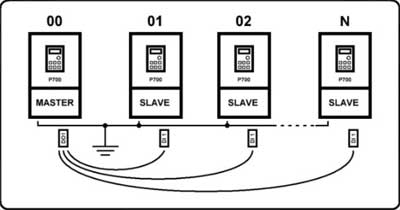
Дискретный сигнал.
К дискретному выходу основного ПЧ подключаем дискретные входы периферийных ПЧ. С помощью меню функций в зависимости от режимов работы устанавливаем для каждого ПЧ необходимые параметры дискретных входов/выходов (выходные для основного и входные для периферийных). Также возможен вариант, когда основной ПЧ сам будет управляться по дискретному сигналу обратной связи, например, от импульсного датчика оборотов, линейной скорости или концевого выключателя.
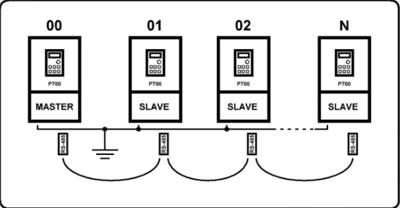
Интерфейс RS-485.
Последовательно, друг за другом, начиная от основного ПЧ, соединяем все устройства «витой парой». В меню настроек для основного ПЧ выбираем статус преобразователя как «MASTER» и скорость передачи данных по интерфейсу. В меню настроек периферийных ПЧ выбираем режим работы через интерфейс, устанавливаем одинаковую для всех скорость передачи данных, каждому раздаем уникальный сетевой номер, устанавливаем поправочные коэффициенты реакции на команды основного ПЧ с учетом требований технологического процесса.
Таким образом, во всех случаях мы получаем систему из нескольких преобразователей, способную гибко подстраиваться (перестраиваться) в зависимости от поставленной задачи, без привлечения более сложных и дорогих систем. Изменяя необходимые параметры (диапазон выходных частот для каждого ПЧ, соотношения величин сигналов и выходных частот, скорости реакции на изменения параметров и так далее), можно подобрать абсолютно любое соотношение производительности на различных операциях в составе сложного технологического процесса.
Точную настройку всей системы необходимо проводить уже непосредственно в реальных условиях.

Пример синхронизации работы нескольких ПЧ.
Автор статьи: Садков Сергей Александрович.
Вы можете скачать данную статью в формате .pdf






